The Autocar project has been undertaken in order to automate the control of a ground vehicle. Specifically, the project team intends to create a control system for automated roadway travel. The team will accomplish this goal by first designing a waypoint navigation system. We find that a waypoint navigation system is a valid solution and less costly solution to the problem of getting a vehicle to follow a roadway when compared with the visual option.
Phase 1: A R/C Car Controller
As the first phase of the project, and for senior design in Purdue ECE 477 class, we are making a waypoint control system that can be mounted to an R/C vehicle. We are designing the system to use global GPS coordinates as waypoints. The control software will be implemented in a PIC18F2x1x microcontroller. Using the PIC and GPS receiver the vehicle will able to negotiate a programmed waypoint course.
Additionally, the software interfaces the PIC18 microcontroller with an ultrasonic sensor and a digital compass. The ultrasonic sensor is needed to avoid collisions with obstacles. The Digital Compass is used to determine the vehicles heading.
The current status of Phase 1 of the project is complete. This phase of the project was demonstrated to the ECE 477 course staff on Thursday, Apr. 26, 2007. In the section bellow is a video showing the engineering process and demonstration of the project's success.
Demonstration Video
Video Demonstration of Project Success
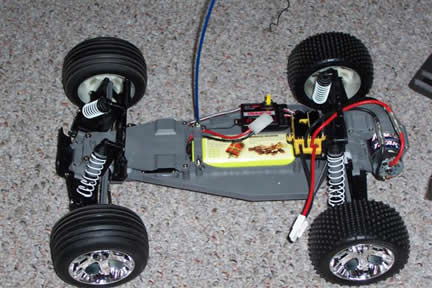
The Vehicle
The vehicle weve chosen to mount our control system to is shown bellow. It is a electric Rustler buggy made by Traxxas. The control signals for the steering motor and electronic speed controller are both 20 mS PWM signals. The duty cycle of this signal needs to vary for 1 to 2 mS to control these devices.
Open Source
We intend to use open source methods to develop this system. We feel that open source systems tend to be most reliable. We find that if this system is ever be used when humans can be endangered it requires the maximum level of peer review, that is only available to open projects. In the names of openness, all software will be licensed under the terms of the GPL. Currently, the team is reviewing the methods that will provide the most openness to our documentation. Since the GPL cannot be used to license documents, we are considering the GFDL. Basically, we will put the products of this project under a copyleft, prohibiting changes of these materials to be made in secret. If you know how to help us manage this aspect of the project, please contact one of the project team members.
CVS Version Control Access
The version control system is avaible. The first document has been put under its control is the homework1.doc. If you are looking for a windows CVS client please check out TourtoisCVS. TourtiosCVS integrates with windows explorer for control of files. These are the CVS servers settings.